
H24年電験1種1次機械問1 三相ブリッジ回路
今回も三相ブリッジ回路についてです。
前回の記事で学習した内容と類似しており、今回は、語句の問題です。
当てはめる言葉を覚えるというより、背景にある数理論を理解したいですね。
問題
H24年度1種機械 試験問題[PDF]
http://www.shiken.or.jp/answer/pdf/148/file_nm03/F1%28K%29.PDF
三相ブリッジ整流回路
回路の概要
ここは前回の記事と同様の説明になります。
(コメントに基づいて記事を修正しました。2018/6/29)
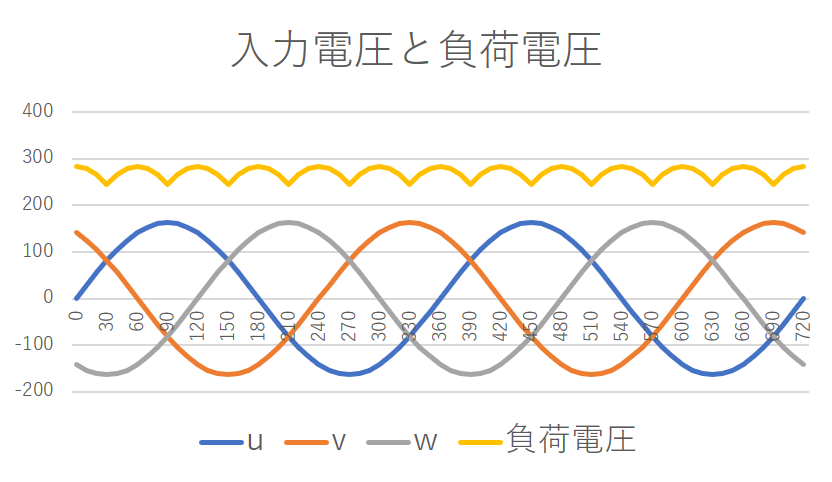
三相ブリッジ整流回路は上左の図のような回路です。
u,v,w相の三相交流の電圧、出力波形は上右の図のようになります。
一般的な三相交流200V電源です。
前回と異なる点として、今回は負荷が直流機になっています。
このような直流電動機の制御方式を、静止レオナード法と呼びます。
直流リアクタンスによりリプルの低減がなされています。
今回のサイリスタ変換器の回路では、
制御遅れ角を制御することで、直流電動機の速度制御をしています。
制御遅れ角はサイリスタのゲート電圧の遅れを表す角度です。
ちなみにuが重なり角です。

制御遅れ角が\(\alpha\)である場合、
出力電圧の平均値(電圧降下を考慮しない)は、
\(E_{d} = \frac{1}{\frac{\pi}{3}}\int_{\frac{\pi}{3}+\alpha}^{\frac{2\pi}{3}+\alpha} \sqrt {2} V sin\theta d\theta \)
\(= \frac{3 \sqrt{2} V}{\pi} cos \alpha \)
となります。
また、重なり角による電圧降下の平均値は、前回記事のとおり、
\(\Delta E_{d} = \frac{3}{\pi} \int_0^u X \frac {dI_u}{d\theta}d\theta = \frac{3 X I_d}{\pi} \)
であるため、これらの式から、出力電圧の平均値は次の通りになる。
\(\frac{3 \sqrt{2} V}{\pi} cos \alpha – \frac{3 X I_d}{\pi} \)
直流電動機の速度制御
こちらは電験3種レベルで出題される話ですが、
直流電動機の回転速度は次のように表されます。
\(N = \frac{V_d – R_a I_d}{k \phi}\)
つまり、\(cos\alpha\)の制御をすることで出力電圧の平均値が変化し、
直流電動機の回転速度を制御することができるということです。
その他にも、電機子巻線抵抗や磁束を変化させる方法もあります。
ここで、直流電動機のトルクが増加するということは、
電機子電流が増加することになります。
出力電圧の平均値は下記の式で表されるため、
\( \frac{3 \sqrt{2} V}{\pi} cos \alpha – \frac{3 X I_d}{\pi} – R_a I_d \)
トルクが増加すると、速度は低下することになります。
回生制御
この問題のような回路では、電流は一方向にしか流れません。
つまり、制御遅れ角を制御するだけでは制動トルクは発生しません。
そこで、回生制動を行うため、界磁電流の方向を逆転させることで
誘導起電力を逆転、直流電圧を負にすることで回生制動を行います。
この時、サイリスタの制御遅れ角は90°以上となります。
負の起電力を発生させる際の角度については、誘導起電力の式が
コサインの式であることから想像できますね。
感想
2年連続で三相ブリッジ回路の問題がでていたようです。
やはり考え方を理解しておくべきだと感じます。
基本的な考え方さえ理解していれば、穴埋め問題の答えも想像が可能です。
三相ブリッジ回路は、出力電圧の平均値と電圧降下、転流や制御遅れについて
理解して得点できるようにしたいです。

コメント